Abstract
Generating human motion that satisfies customized zero-shot goal functions, enabling applications such as controllable character animation and behavior synthesis for virtual agents, is a critical capability. While current approaches handle many unseen constraints, they fail on tasks with very challenging spatiotemporal restrictions, such as severe spatial obstacles or specified numbers of walking steps.
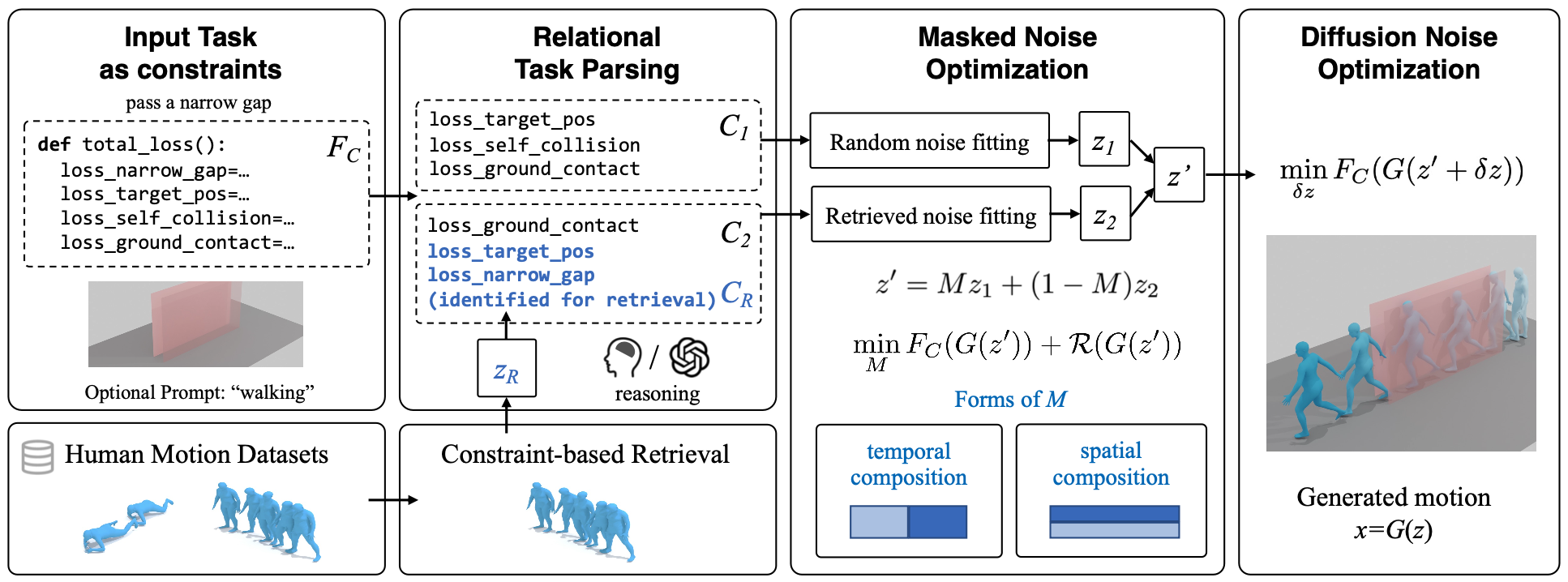
To equip motion generators for these highly constrained tasks, we present a retrieval-guided method built on the training-free diffusion noise optimization framework. The key idea is to search within large motion datasets for guidance that can potentially satisfy difficult constraints. We introduce relational task parsing to group target constraints and identify the difficult ones to be handled by retrieved reference. A better initialization for diffusion noise is then obtained via a reward-guided mask that combines random noise with retrieved noise. By optimizing diffusion noise from this improved initialization, we successfully solve highly constrained generation tasks. By leveraging LLM for relational task parsing, the whole framework is further enabled to automatically reason for what to retrieve, improving the intelligence of moving agents under a training-free optimization scheme. Code will be released upon publication.
Overall Pipeline